Predicting Surrounding Vehicles Trajectory - Accurate Prediction To Ensure Safe And Reasonable Interaction
Intelligent vehicle systems rely heavily on predicting surrounding vehicles trajectory. The ultimate path taken by intelligent vehicles is inextricably linked to the accuracy of their trajectory predictions. Several obstacles exist for the job of trajectory prediction as a result of the complexity and changeability of the driving environment. The immediate estimated velocity of surrounding vehicles, knowledge of common patterns of vehicle movements, and interactions between vehicles are the three forms of information used in previous research for trajectory prediction.
Author:Suleman ShahReviewer:Han JuNov 07, 202260 Shares988 Views
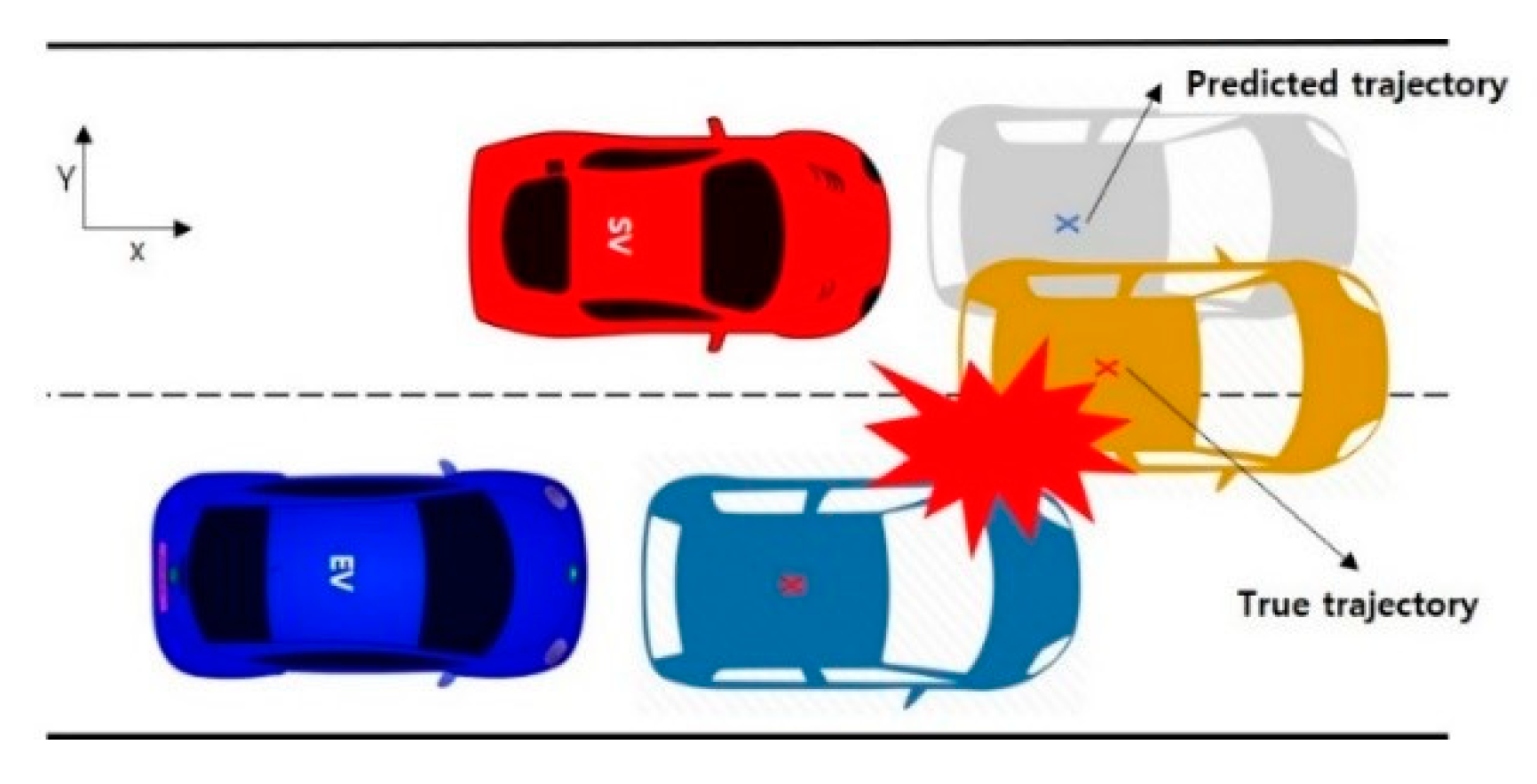
Intelligent vehicle systems rely heavily on predicting surrounding vehicles trajectory. The ultimate path taken by intelligent vehicles is inextricably linked to the accuracy of their trajectory predictions. Several obstacles exist for the job of trajectory prediction as a result of the complexity and changeability of the driving environment.
The immediate estimated velocity of surrounding vehicles, knowledge of common patterns of vehicle movements, and interactions between vehicles are the three forms of information used in previous research for trajectory prediction. Many approaches were developed that employed a kinematic model in conjunction with an estimated motion state of nearby vehicles to forecast where those vehicles would go in the future.
Target Driven Trajectory Prediction
In practical settings, it is crucial to be able to foresee how mobile agents will act in the future. It is difficult since the agent's motivations and actions are opaque and multimodal by nature. The primary realization is that a collection of target states may effectively encapsulate the future modes for prediction within a modest time horizon.
Thus, we arrive at our target driven trajectory prediction framework for target-driven trajectory prediction. In target driven trajectory prediction, all three phases are trained together. As a first stage, it encodes an agent's interactions with the environment and other agents to foresee the T-steps-into-the-future goal states the it may be able to achieve. Then, target driven trajectory prediction creates target-dependent sequences of trajectory states. At last, the probabilities of trajectories are estimated, and the most condensed collection of trajectories is chosen.
In contrast, earlier work modeled agent intentions as latent variables and relied on test-time sampling to construct a variety of trajectories. target driven trajectory prediction is employed as a baseline for trajectory prediction, and it showed that it can beat the state-of-the-art on the Argoverse Forecasting, Interaction, Stanford Drone, and Pedestrian-at-Intersection dataset.
Maneuver Aware Pooling For Predicting Vehicle Trajectory
For maximum independence, an AV needs the ability to foresee changes in its surroundings. To do this, the AV's trajectory is predicted around it in an iterative fashion, while the trajectories of all other vehicles in the vicinity are also predicted. The issue of predicting the paths of cars operated by humans is solved that are close to an autonomous vehicle.
The drive comes from a desire to enhance motion prediction precision during lane changes and highway merging by cars. A pooling technique utilizes information about the vehicles' directional and radial velocities as signals. In this way, the pooling vector takes into account how the cars around it are likely to move.
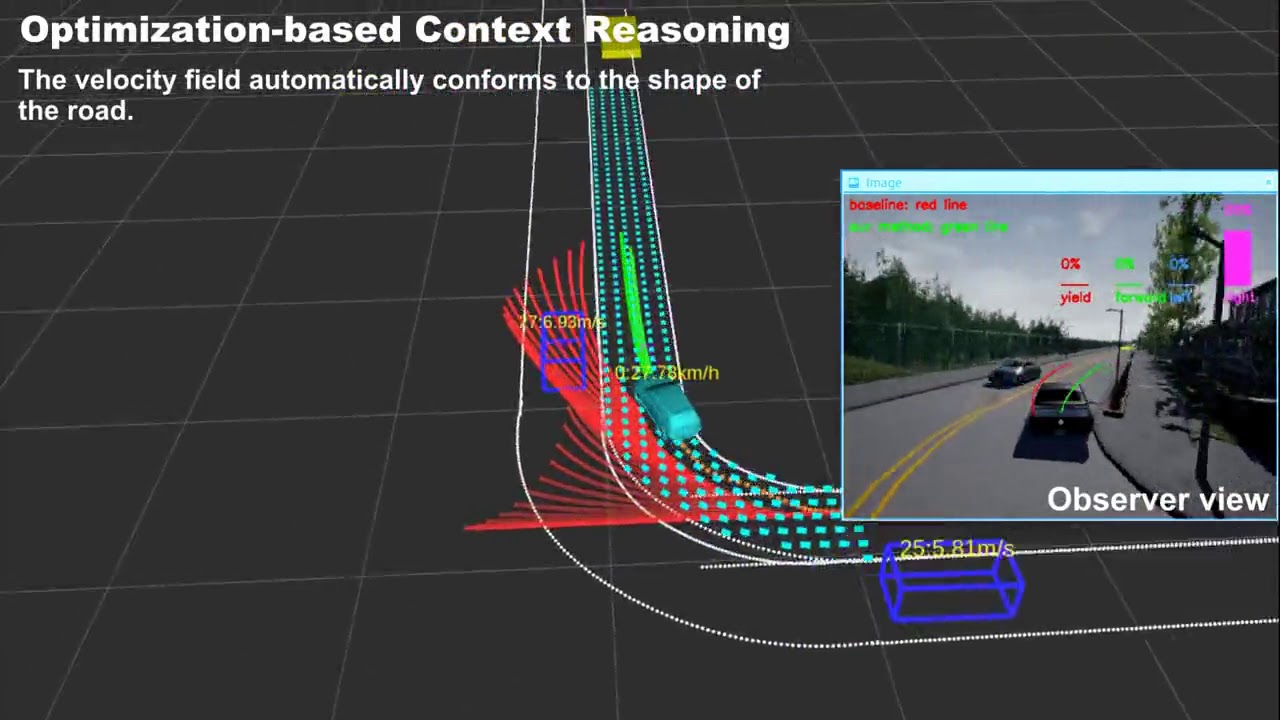
Online vehicle trajectory prediction using learning and optimization
People Also Ask
What Is Autonomous Driving Prediction?
Future trajectories of all moving agents (people, cars, etc.) in a scene are predicted by a forecasting model using the historical trajectories of these agents and/or the scene context.
What Is Pedestrian Trajectory Prediction?
Long Short-Term Memory (LSTM) has been widely used for temporal representation of walking trajectories, and pedestrian trajectory prediction has become a popular research track that has progressed towards modeling of crowd social and contextual interactions.
What Is Trajectory Forecasting?
Behaviour prediction is a feature of autonomous cars that uses current and historical observations of their environment to make predictions about the states of other vehicles in the area. That way, they'll be more prepared to deal with the threats they face.
Final Words
The human driver's selective-attention process serves as inspiration for two spatial attention mechanisms, namely, context attention and lane attention, for vehicle trajectory prediction. These two methods choose relevant context vectors for capturing the crucial information in driving circumstances, which help in the subsequently predicting surrounding vehicles trajectory.

Suleman Shah
Author
Suleman Shah is a researcher and freelance writer. As a researcher, he has worked with MNS University of Agriculture, Multan (Pakistan) and Texas A & M University (USA). He regularly writes science articles and blogs for science news website immersse.com and open access publishers OA Publishing London and Scientific Times. He loves to keep himself updated on scientific developments and convert these developments into everyday language to update the readers about the developments in the scientific era. His primary research focus is Plant sciences, and he contributed to this field by publishing his research in scientific journals and presenting his work at many Conferences.
Shah graduated from the University of Agriculture Faisalabad (Pakistan) and started his professional carrier with Jaffer Agro Services and later with the Agriculture Department of the Government of Pakistan. His research interest compelled and attracted him to proceed with his carrier in Plant sciences research. So, he started his Ph.D. in Soil Science at MNS University of Agriculture Multan (Pakistan). Later, he started working as a visiting scholar with Texas A&M University (USA).
Shah’s experience with big Open Excess publishers like Springers, Frontiers, MDPI, etc., testified to his belief in Open Access as a barrier-removing mechanism between researchers and the readers of their research. Shah believes that Open Access is revolutionizing the publication process and benefitting research in all fields.

Han Ju
Reviewer
Hello! I'm Han Ju, the heart behind World Wide Journals. My life is a unique tapestry woven from the threads of news, spirituality, and science, enriched by melodies from my guitar. Raised amidst tales of the ancient and the arcane, I developed a keen eye for the stories that truly matter. Through my work, I seek to bridge the seen with the unseen, marrying the rigor of science with the depth of spirituality.
Each article at World Wide Journals is a piece of this ongoing quest, blending analysis with personal reflection. Whether exploring quantum frontiers or strumming chords under the stars, my aim is to inspire and provoke thought, inviting you into a world where every discovery is a note in the grand symphony of existence.
Welcome aboard this journey of insight and exploration, where curiosity leads and music guides.
Latest Articles
Popular Articles